車輪移動ロボット・メカトロニクス研究室
メンバー: 和田正義、子安大士
分野: 機械工学
所属: 工学研究院先端機械システム部門
キーワード: ロボティクス・メカトロニクス
研究概要


車輪により移動するロボットや車両、メカトロニクスシステムの研究を行っています。コンピュータで電気モータを制御することにより、ロボット・メカトロニクス機器は人間よりも俊敏にそして力強く動作することが可能です。
この技術を移動機器に応用することで、人間の移動の支援を行うことができますが、状況認識や制御を誤ると逆に危険な状況を生み出す恐れもあります。
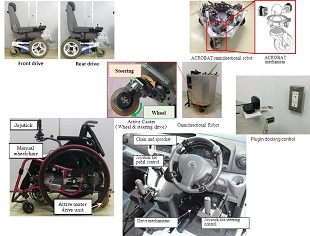
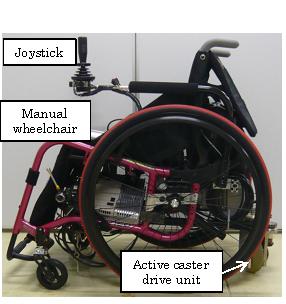
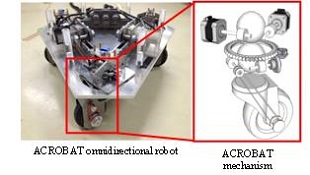
本研究室では車輪型移動ロボット(全方向移動機構とその制御)や電動車両の動作制御(電動車いすのシステム設計や制御)、あるいは操縦システム(ジョイスティック式自動車運転装置)等、機械設計から制御まで総合的な研究開発を行っています。
主要論文・参考事項
和田正義、亀田藤雄、"片手による自動車の運転を支援するジョイスティックシステム" 日本福祉工学会誌、 Vol.11. No.2, pp.43-48, 2009.11
Masayoshi Wada, Yusuke Inoue and Takahiro Hirama," A New Active-caster Drive System with a Dual-ball Transmission for Omnidirectional Mobile Robots," Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2012), pp.2525-2532, Algarve, Portugal, October 2012.
和田正義、亀田藤雄、斎藤征道,"ジョイスティック式自動車運転装置による操舵制御に関する検討" 計測自動制御学会論文誌 Vol.49.No.4, pp.417-424, 2013.4.
和田正義、井上雄介,平間貴大,"球による動力伝達機構を用いたアクティブキャスタの運動解析と機構設計" 日本ロボット学会誌、 Vol.31, No.6, pp.591-598, 2013.7
宗方宥,和田正義、"アクティブキャスタを用いた簡易電動車いす駆動システムに関する研究" 日本ロボット学会誌、 Vol.32, No.2, pp.172-182, 2013
Yu MUNAKATA, Masayoshi WADA, "アクティブキャスタを用いた簡易電動車いす駆動システムに関する研究" International Journal of Mechatronics and Automation、Inderscience, Vol.4, No.4, pp222-235, 2013
Yusuke Inoue, Takahiro Hirama and Masayoshi Wada," Design of Omnidirectional Mobile Robots with ACROBAT Wheel Mechanisms," Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2013), pp.4852-4859, Tokyo, Japan, November 2013.
和田正義、" 全方向移動車両およびその制御方式" 特許3560403号
Masayoshi Wada, "Omnidirectional Vehicle and Method of Controlling the Same," U.S. Patent No.5,924,512.
Masayoshi Wada and Haruhiko H. Asada, "Reconfigurable Footprint Mechanism for Omnidirectional Vehicle," U.S. Patent No.5,927,423
亀田藤雄、和田正義、“自動車運転支援装置および自動車”,特許5406096号
お問い合わせ先
東京農工大学・先端産学連携研究推進センター
urac[at]ml.tuat.ac.jp([at]を@に変換してください)
Wheeled Mobile Robots
Research members: Dr. Masayoshi Wada, Dr. Hiroshi Koyasu
Research fields: Mechanical engineering
Departments: Institute of Engineering, Advanced Mechanical Systems Engineering
Keywords: Robotics and Mechatronics
Summary
In our laboratory, research topics include wheeled mobile robots, automobile and mechatronics systems. Electric motors controlled by computer systems enable robots and mechatronic systems to move faster and more powerful than human.
Such systems with the control technologies support human activities in working, moving, etc. However, it might harm humans if the system made wrong decisions or the system became un-controllable.
In this lab., wheeled mobile robots(omnidirectional mobile robots), motion control of electric mobiles(electric wheelchairs), and human-machine interface of mechatronics systems(joystick car driving systems for disabel people) are researched and developed, which are covering wide area of engineering technologies including machine design, electric circuit design, programming, and control theories.
Reference articles and patents
和田正義、亀田藤雄、"片手による自動車の運転を支援するジョイスティックシステム" 日本福祉工学会誌、 Vol.11. No.2, pp.43-48, 2009.11
Masayoshi Wada, Yusuke Inoue and Takahiro Hirama," A New Active-caster Drive System with a Dual-ball Transmission for Omnidirectional Mobile Robots," Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2012), pp.2525-2532, Algarve, Portugal, October 2012.
和田正義、亀田藤雄、斎藤征道,"ジョイスティック式自動車運転装置による操舵制御に関する検討" 計測自動制御学会論文誌 Vol.49.No.4, pp.417-424, 2013.4.
和田正義、井上雄介,平間貴大,"球による動力伝達機構を用いたアクティブキャスタの運動解析と機構設計" 日本ロボット学会誌、 Vol.31, No.6, pp.591-598, 2013.7
宗方宥,和田正義、"アクティブキャスタを用いた簡易電動車いす駆動システムに関する研究" 日本ロボット学会誌、 Vol.32, No.2, pp.172-182, 2013
Yu MUNAKATA, Masayoshi WADA, "アクティブキャスタを用いた簡易電動車いす駆動システムに関する研究" International Journal of Mechatronics and Automation、Inderscience, Vol.4, No.4, pp222-235, 2013
Yusuke Inoue, Takahiro Hirama and Masayoshi Wada," Design of Omnidirectional Mobile Robots with ACROBAT Wheel Mechanisms," Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2013), pp.4852-4859, Tokyo, Japan, November 2013.
和田正義、" 全方向移動車両およびその制御方式" 特許3560403号
Masayoshi Wada, "Omnidirectional Vehicle and Method of Controlling the Same," U.S. Patent No.5,924,512.
Masayoshi Wada and Haruhiko H. Asada, "Reconfigurable Footprint Mechanism for Omnidirectional Vehicle," U.S. Patent No.5,927,423
亀田藤雄、和田正義、“自動車運転支援装置および自動車”,特許5406096号
Contact
University Research Administration Center(URAC),
Tokyo University of Agriculture andTechnology
urac[at]ml.tuat.ac.jp
(Please replace [at] with @.)